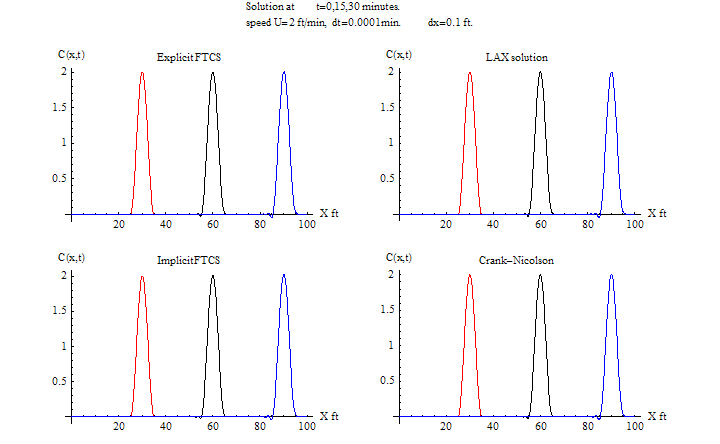
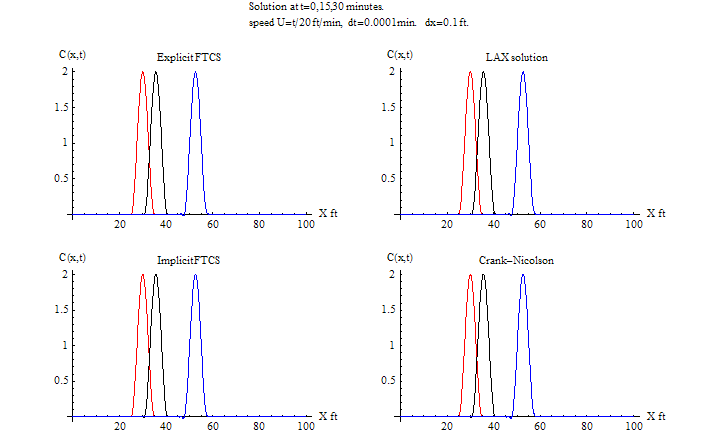
\(\tau =0.0001\) sec, \(h=0.1\ ft\)
Note the following: The explicit FTCS remained stable throughout the run due to the small time step. All other methods were stable as well during the run. For the CPU for the varying \(u\) case, notice that for the implicit methods this value is larger than the CPU for the same methods but when \(u\) is fixed. This is due to the fact that the matrix \(A\) is no longer constant, and must be recomputed at each time step before calling Thomas algorithm to solve \(Ax=b\) system.
Also notice that the CPU time for the implicit methods is larger than the explicit methods. This is due to the extra computational cost in solving \(Ax=b\). Even when using Thomas algorithm, this is still more expensive than the explicit methods when number of time steps is large.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}