This report in PDF
Van der Pol differential equation is given by
In this analysis, we will consider the case only for positive  . We will analyze the stability of this equation
and generate a phase diagram.
. We will analyze the stability of this equation
and generate a phase diagram.
The first step in examining stability of a non-linear differential equation is to convert it to state space by introducing 2 state variables.

Therefore

Equilibrium points are found by solving  , hence from the above, we see that
, hence from the above, we see that  and from
and from
 we conclude that
we conclude that  as well. Hence
as well. Hence

The system matrix is now found. First we note that  , and
, and
 , hence
, hence

Hence  at
at  becomes
becomes

Now we find the characteristic equation

Hence  , therefore
, therefore

If  then both roots are on the RHS, hence system is unstable (equilibrium point is a repelling
point).
then both roots are on the RHS, hence system is unstable (equilibrium point is a repelling
point).
If  then we have
then we have  , and we have spiral out equilibrium point, unstable.
, and we have spiral out equilibrium point, unstable.
We need to obtain a relation between  and
and  . From the differential equation
. From the differential equation

rewrite in state space variables, we obtain

Hence the above is in the form  , therefore the isoclines lines can be found by
setting
, therefore the isoclines lines can be found by
setting

Where  is a constant. Hence we obtain the parameterize equation to use to plot the gradient lines
as
is a constant. Hence we obtain the parameterize equation to use to plot the gradient lines
as

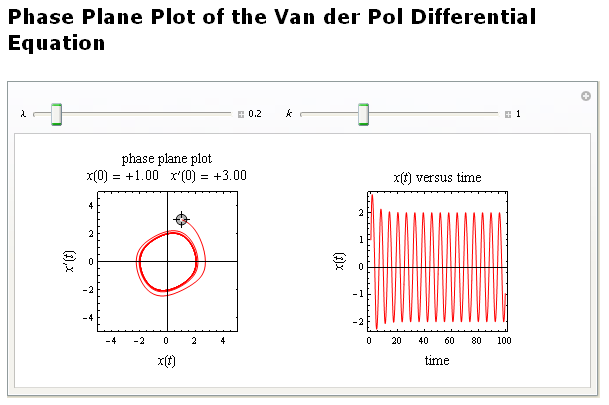
To generate the phase diagram1 ,
a program was written which allows one to adjust the initial conditions and the parameters  and
and  and
observe the effect on the shape of the limit cycle. We see that starting from different initial conditions, the
solution trajectory always ends up in a limit cycle.
and
observe the effect on the shape of the limit cycle. We see that starting from different initial conditions, the
solution trajectory always ends up in a limit cycle.
The following is a screen shot of the program written for this project.