HW 3.18
Nasser Abbasi
SOURCE CODE
%
nma_HW_3_18 - Program to solve problem 3.18
clear all; help nma_HW_3_18; % Clear memory and print header
%
% by
Nasser Abbasi
%
%* Set
initial position and angle of the pendulum
alpha = input('Enter initial angle (degree):');
alpha = alpha*pi/180; % convert
degree to radian
springRestLength=1; % rest length is 1 meter
ext = input('Enter
extension from rest length: (m)');
pos = [alpha
springRestLength+ext]
w0 = input('Enter initial angular velosity w (radian/sec):');
r0 = input('Enter initial mass velosity along the pendulum axis
(m/s):');
v = [w0 r0];
state = [ pos(1) pos(2)
v(1) v(2) ]; %
Used by R-K routines
initialState = state;
%* Set
physical parameters
param = struct('length',springRestLength, ...
'mass',0.1, ...
'k',0);
adaptErr = 1.e-3; % Error parameter used by adaptive Runge-Kutta
%* Loop
over desired number of steps using specified
% numerical method.
nStep = input('Enter number of steps: ');
tau = input('Enter time step (sec): ');
% spring
constants to try
springConstant=[10^2 10^3
10^4 10^5 10^6];
for i=1:length(
springConstant )
param.k = springConstant(i);
time=0;
state = initialState;
for n=1:nStep
%* Record position for plotting
thetaPlot(n) =
state(1);
rPlot(n) =
state(2);
wPlot(n) =
state(3);
speed(n) =
state(4);
[state time tau] = rka(state,time,tau,adaptErr,'nma_HW_3_18_deriv',param);
end
averageTimeStep = time / nStep;
fprintf('Time used for k=%g is %g,
average time step=%g\n',...
param.k,time,averageTimeStep);
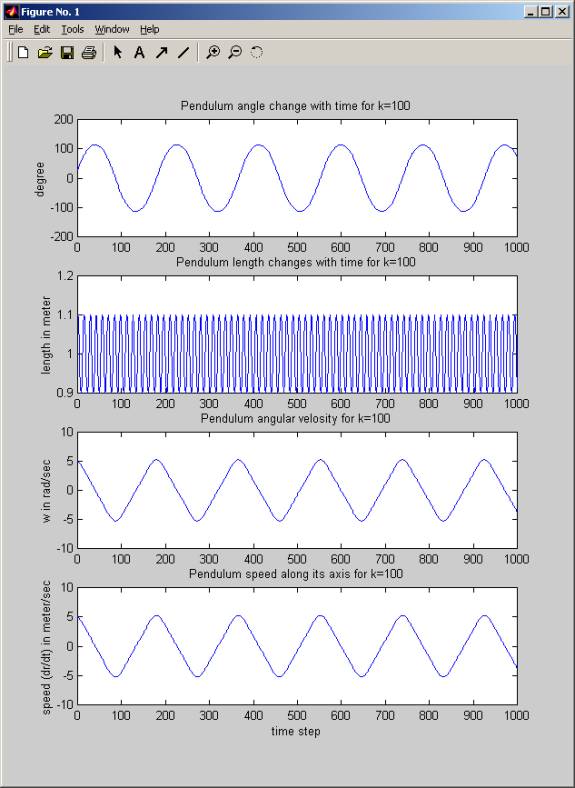
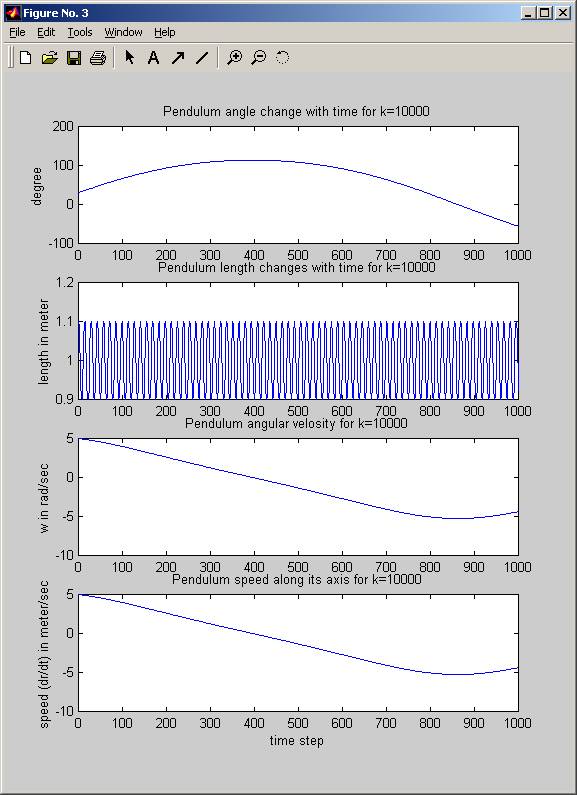
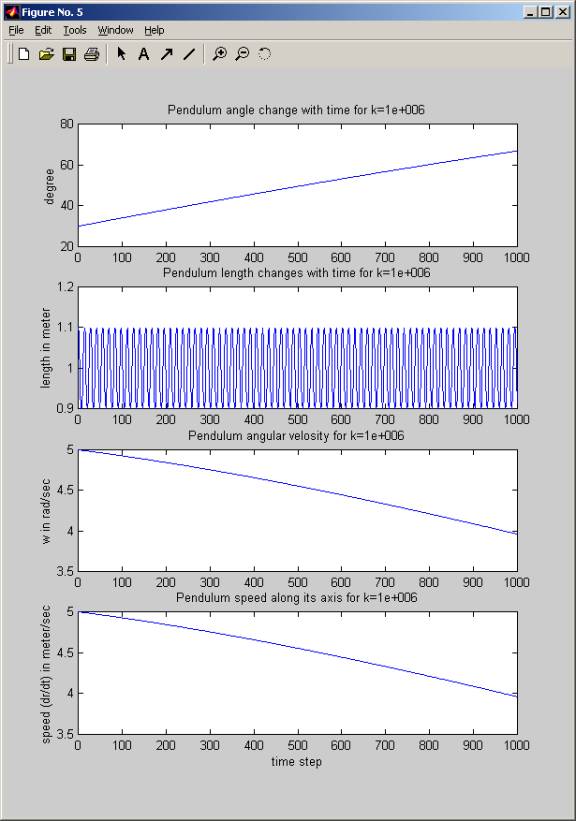
figure;
subplot(4,1,1);
plot( (180/pi) .* thetaPlot );
title(sprintf('Pendulum angle
change with time for k=%g',param.k));
ylabel('degree');
subplot(4,1,2);
plot(rPlot);
title(sprintf('Pendulum length
changes with time for k=%g',param.k));
ylabel('length in meter');
subplot(4,1,3);
plot(wPlot);
title(sprintf('Pendulum angular
velosity for k=%g',param.k));
ylabel('w in rad/sec');
subplot(4,1,4);
plot(wPlot);
title(sprintf('Pendulum speed along
its axis for k=%g',param.k));
ylabel('speed (dr/dt) in meter/sec');
xlabel('time step');
kTrack(i,1)=param.k;
kTrack(i,2)=averageTimeStep;
end
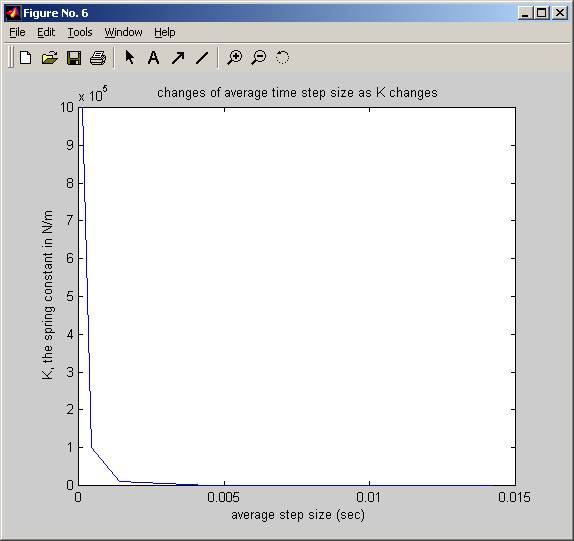
figure;
plot(kTrack(:,2),kTrack(:,1));
title(' changes of average time
step size as K changes');
ylabel(' K, the spring constant in
N/m');
xlabel(' average step size (sec)');
function deriv
= nma_HW_3_18_deriv(s,t,param)
% Returns right-hand side of pendulum ODE;
used by Runge-Kutta routines
% problem 3.18
%
% Inputs
% s
State vector [theta r w speed]
% t
% param
Parameter struct
% Output
% deriv
Derivatives
% Nasser
Abbasi, feb 20. 2002.
g= 9.8; % gravitation
m/s^2
deriv(1) = s(3);
deriv(2) = s(4);
deriv(3) = -(g/s(2)) *
sin(s(1));
deriv(4) =
-(param.k/param.mass) * (s(2) - param.length);
return;
OUTPUT
» nma_HW_3_18
nma_HW_3_18 - Program to solve problem 3.18
Enter initial angle (degree):30
Enter extension from rest length: (m)0.1
pos =
0.5236 1.1000
Enter initial angular velosity w (radian/sec):5
Enter initial mass velosity along the pendulum axis (m/s):0.1
Enter number of steps: 1000
Enter time step (sec): 0.01
Time used for k=100 is 14.2045, average time step=0.0142045
Time used for k=1000 is 4.48814, average time step=0.00448814
Time used for k=10000 is 1.41925, average time step=0.00141925
Time used for k=100000 is 0.449157, average time step=0.000449157
Time used for k=1e+006 is 0.142036, average time step=0.000142036
»